Photogrametry, VSLAM, Super Renz, AutoDriving-002
(3次元技術 第2回目)
今回から5回にわたり、清水社長からのメッセージを
お届けいたします。
写真測量の精度向上課題解決時に偶然発見した
「スーパーレンズ原型」の発展的研究について
・写真測量法(フォトグラメトリー)*後述説明、
VSLAM(単眼カメラによる自己位置推定)*後述説明
と周辺マップ作成技術は、自動運転(ロボット)社会
に必要不可欠な技術である。
・上記技術が実運用に至っていない要因は、広角カメラのレンズ歪みを
デジタル技術では除去しきれないことによる
・本課題を解決するため「レンズレスカメラ」の研究開発に着手し、
微小アパーチャーに近接場光を発生させ、
電磁場を励起させる光トランジスター効果を発揮する
単純なメタマテリアル構造を発見しました。
株式会社デジタルハンズ
代表取締役 清水 敏雄
(後述説明)
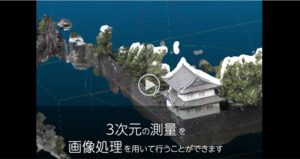
*写真測量法(フォトグラメトリー)
Photogrammetry(写真測量法) とは、
写真画像から対象物の3次元データを作る方法。
写真測量法の歴史は現代写真技術と同じくらい古く、
起源は19世紀半ばに遡ります。
フォトグラメトリと呼ばれる技術は、
デジタルカメラ等で多面的に撮影した複数のデジタル写真を
コンピュータで画像解析し、
3次元コンピュータグラフィックス等を
得るプロセスを指す言葉として用いられる。
写真測量の最も単純な例として、
写真画像面に平行な平面上に存在する2点間の
距離を求める場合があげられる。
写真画像の縮尺が分かっていれば、画像上の距離を測定し、
実際の距離を縮尺から逆算して求めることができる。
(ウィキペディアから)
*VSLAM(単眼カメラによる自己位置推定)
Visual SLAM(Simultaneous Localization and Mapping)は、
カメラで撮影された映像から3次元情報とカメラの
位置姿勢を同時に推定する技術です。
本技術を利用することで、GPS信号の届かない状況での
ロボットの自律走行などが実現可能となります。