3次元技術 番外編002
LiDARを使用しない自動運転へ向けて
現在の技術では、半導体レーザー計測のLiDARを使用。
汎用的なベロダインのLiDARは、車両の屋根の上に載せて使う。
昔のパトカーの屋根の回転灯のように、本体がぐるぐる回転して、
周囲360度にレーザー光を発射し、車両周囲のどこに物体があるか、
物体までの距離はどの程度か、更に物体の形状もかなり把握できる。
ベロダインのライダーは物体の形状までかなり細かく
把握できる高性能なものだが価格も高い。
最も高性能なタイプで、7万5000ドル(約750万円)、
性能を落としてた最低価格タイプで8000ドル(約80万円)といわれており、
市販車に取り付けて普及できる値段ではない。
対して、現在開発中の安価方法として、
LiDARを使用しないカメラと制御ソフトだけの
カメラ画像から3次元データ生成させる方式。
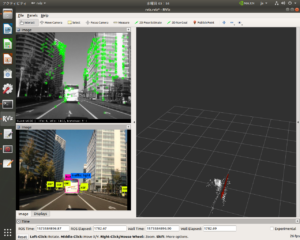
車載デバイス(NVIDIA Jetson nano)にて
カメラ映像録画、VSLAM、オブジェクトトラッキングを
同時に動作させた画面キャプチャーです。
左上がVSLAMの計測点、右の点がポイントクラウド(3D点群)、
赤の矢印が自己位置を向き、左下がAIによる
オブジェクト(人や車等)を認識しているところ
レンズ歪みの影響で近傍と遠方が同時に計測できないのが難点で、
ここをスーパーレンズで対策予定です。
ここでは、1つのカメラ映像から両方を計測していることがポイントで
LiDAR+カメラ等では難しいことを、この仕組みで難なく達成しています。
これはおそらく世界初の快挙と自負しています。
3D計測でも対象物だけを高精度に計測する方法としても活用できます。