Photogrametry, VSLAM, Super Renz, AutoDriving-003
(3次元技術 第3回目)
引き続き、清水社長からのメッセージを
お届けいたします。
表現が学者的なので、勝手ながら解説を入れてゆきます。
清水社長は、東京大学大学院のとある研究室に技術指南する
関係が有り、また、成蹊大学理工学部の研究室とも共同開発予定です。
開発したレンズ原型には、以下の特徴があります。
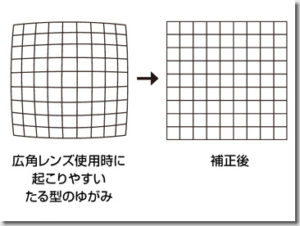
・歪みレスで3次元測位が高精度かつリアルタイム
・広角かつ歪みレスなため、周囲複数カメラ映像合成も
歪みレス(アラウンドビューカメラ)
・レンズレスのためミラー機能を損なわずに
サイド/バックミラー内蔵カメラを実現
・フォーカスレスのため、ガラス、水滴、その他
近接障害物による映像の乱れがない、安定的な認知を実現
・集光しないので太陽光、ライト等の逆光に強い
・歪みレスのため、人間の目の焦点距離映像をデジタル処理
で再現できる(距離感を肉眼に合わせる)
欠点は、
・集光しないので屈折を利用したレンズカメラに対して
現状では暗い(研究開発を進めれば改善できる)
簡単に言い換えますと、
これまでのカメラには必ずガラス製やプラスチック製のレンズが
使われていましたが、極論を言えば、それが不要になる。
不要になるばかりでなく、画像が湾曲したりしない。
更に、全部の焦点が合うのでピンと合わせのフォーカス機能が不要になる。
逆光に強い。
そして、コンタクトレンズに応用できれば遠近全焦点が合う。
欠点については、まだ開発段階なので画像が暗い。
但し、周囲の形状変化で明るさが大きく変化しているので解決できる。
カメラレンズの代替としての性能の説明をしましたが、
次回は、スマホカメラの場合についての説明を致します。